
The research agenda of SOCRATES integrates seven main disciplines spanning STEM fields to social sciences; from traditionally technical disciplines such as robot embodiment and control to areas which support human interaction such as visual learning and language processing, to cognitive modeling which enables more high level human-robot cooperation, and finally to areas which bridge from individual to society via behavioral research and public policy. Unlike typical programs in human-centered robotics, our program goes beyond human-robot interaction to robot-society interactions with an overarching goal of enhancing life for both the individual and society.





Select Publications
Dana, Kristin J., Clinton Andrews, Kostas Bekris, Jacob Feldman, Matthew Stone, Pernille Hemmer, Aaron Mazzeo, Hal Salzman, and Jingang Yi. “Socially Cognizant Robotics for a Technology Enhanced Society.” arXiv preprint arXiv:2310.18303 (2023).
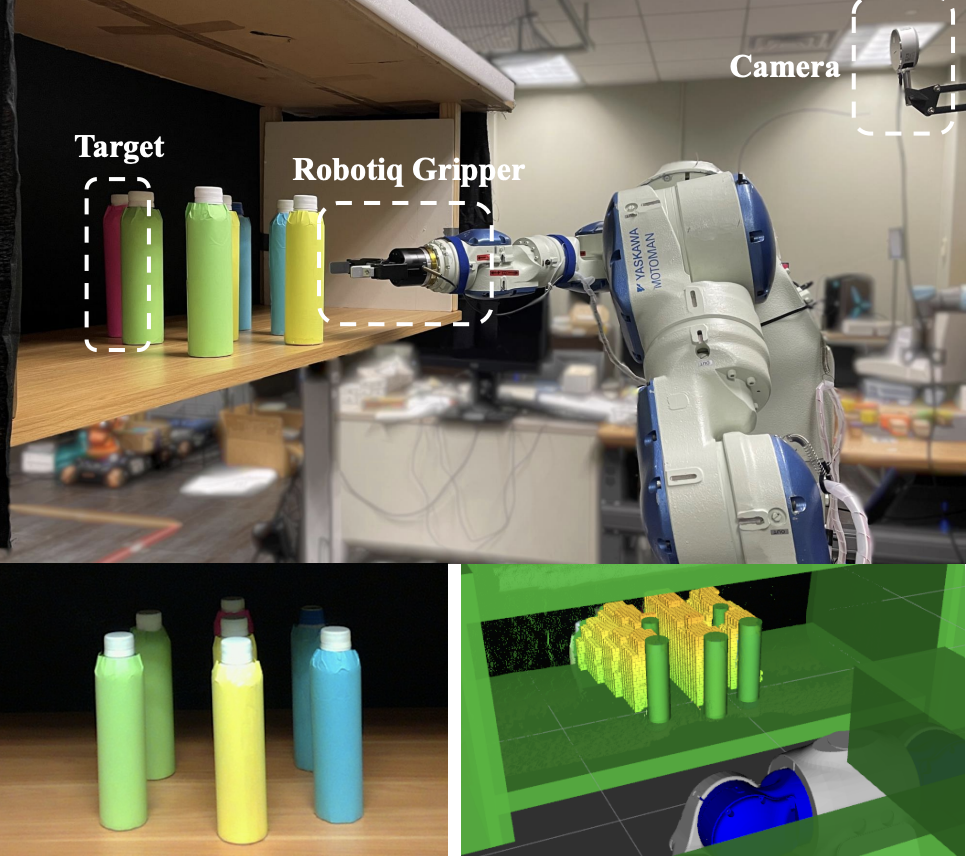
Nakhimovich, Daniel, Yinglong Miao, and Kostas E. Bekris. “Resolution Complete In-Place Object Retrieval given Known Object Models.” IEEE International Conference on Robotics and Automation (ICRA) (2023).
Johnson, Faith, and Kristin Dana. “Learning a Pedestrian Social Behavior Dictionary.” British Machine Vision Conference (BMVC) 2023.
Geib, Christopher, Denson George, Baber Khalid, Richard Magnotti, and Matthew Stone. “An Integrated Architecture for Common Ground in Collaboration.”, Advances in Cognitive Systems 10 (2022).
Salzman, Hal, and Daniel Douglas. “STEM education and workforce development: the history, politics, and evidence.” International Encyclopedia of Education (2023): 358-369.
Andrews, Clinton J. “Preparing to Design Robots for Social Contexts.” IEEE Technology and Society Magazine 41, no. 1 (2022): 15-17.
Greenberg, Benjamin, Daniel Nakhimovich, Richard Magnotti, Hriday Purohit, Sanskar Shah, Aniket Satish Kulkarni, Uriel Gonzalez-Bravo, and Noah R. Carver. “Development of a Socially Cognizant Robotic Campus Guide.” In Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, 1229-1232. New York, NY, USA: Association for Computing Machinery, (2024).
Harmatz, Noah, Alina Zahra, Amir Abdelmalak, Shivam Purohit, Trevor Shin, and Aaron D. Mazzeo. “Hybrid Force-Position Control of an Elastic Tendon-Driven Scrubbing Robot (TEDSR).” In Proceedings of 2024 IEEE International Conference on Robotics and Automation, Yokohama, Japan: IEEE, (2024).
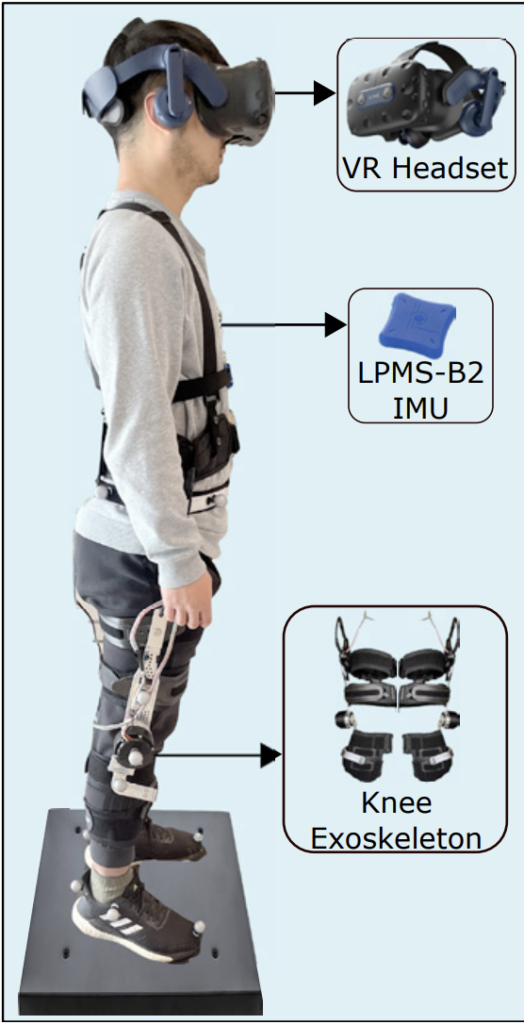
Sreenivasan, Gayatri, Cong Zhu, and Jingang Yi. “Knee Stiffness in Assistive Device Control at Quiet Stance: A Preliminary Study.” In Proceedings of 2023 Modeling, Estimation and Control Conference, Lake Tahoe, CA, IFAC PaperOnline, vol. 56-3, 2023, pp. 163-168.